802
14 CFR Ch. I (1–1–19 Edition)
Pt. 36, App. A
arithmetically to the EPNL value calculated
from the measured data.
A36.9.3.5
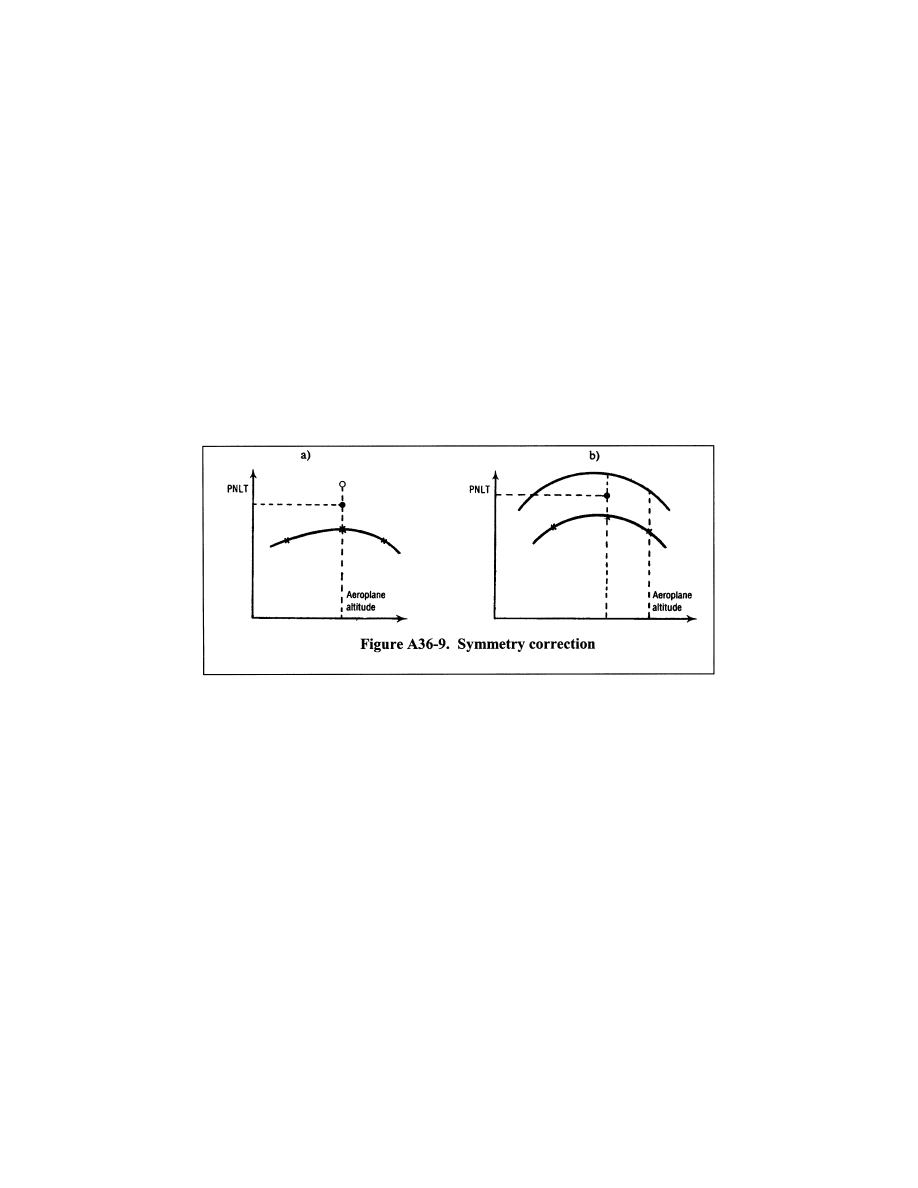
Symmetry adjustments.
A36.9.3.5.1 A symmetry adjustment to each
lateral noise value (determined at the sec-
tion B36.4(b) measurement points), is to be
made as follows:
(a) If the symmetrical measurement point
is opposite the point where the highest noise
level is obtained on the main lateral meas-
urement line, the certification noise level is
the arithmetic mean of the noise levels
measured at these two points (see Figure
A36–9(a));
(b) If the condition described in paragraph
(a) of this section is not met, then it is as-
sumed that the variation of noise with the
altitude of the airplane is the same on both
sides; there is a constant difference between
the lines of noise versus altitude on both
sides (see figure A36–9(b)). The certification
noise level is the maximum value of the
mean between these lines.
A36.9.4
Integrated method of adjustment
A36.9.4.1
General.
As described in this sec-
tion, the integrated adjustment method con-
sists of recomputing under reference condi-
tions points on the PNLT time history cor-
responding to measured points obtained dur-
ing the tests, and computing EPNL directly
for the new time history obtained in this
way. The main principles are described in
sections A36.9.4.2 through A36.9.4.4.1.
A36.9.4.2
PNLT computations.
(a) The portions of the test flight path and
the reference flight path described in para-
graph (a)(1) and (2), and illustrated in Figure
A36–10, include the noise time history that is
relevant to the calculation of flyover and ap-
proach EPNL. In figure A36–10:
VerDate Sep<11>2014
12:50 Apr 30, 2019
Jkt 247046
PO 00000
Frm 00812
Fmt 8010
Sfmt 8002
Y:\SGML\247046.XXX
247046
ER08JY02.019</GPH>
spaschal on DSK3GDR082PROD with CFR