AIM
4/3/14
1−2−3
Area Navigation (RNAV) and Required Navigation Performance (RNP)
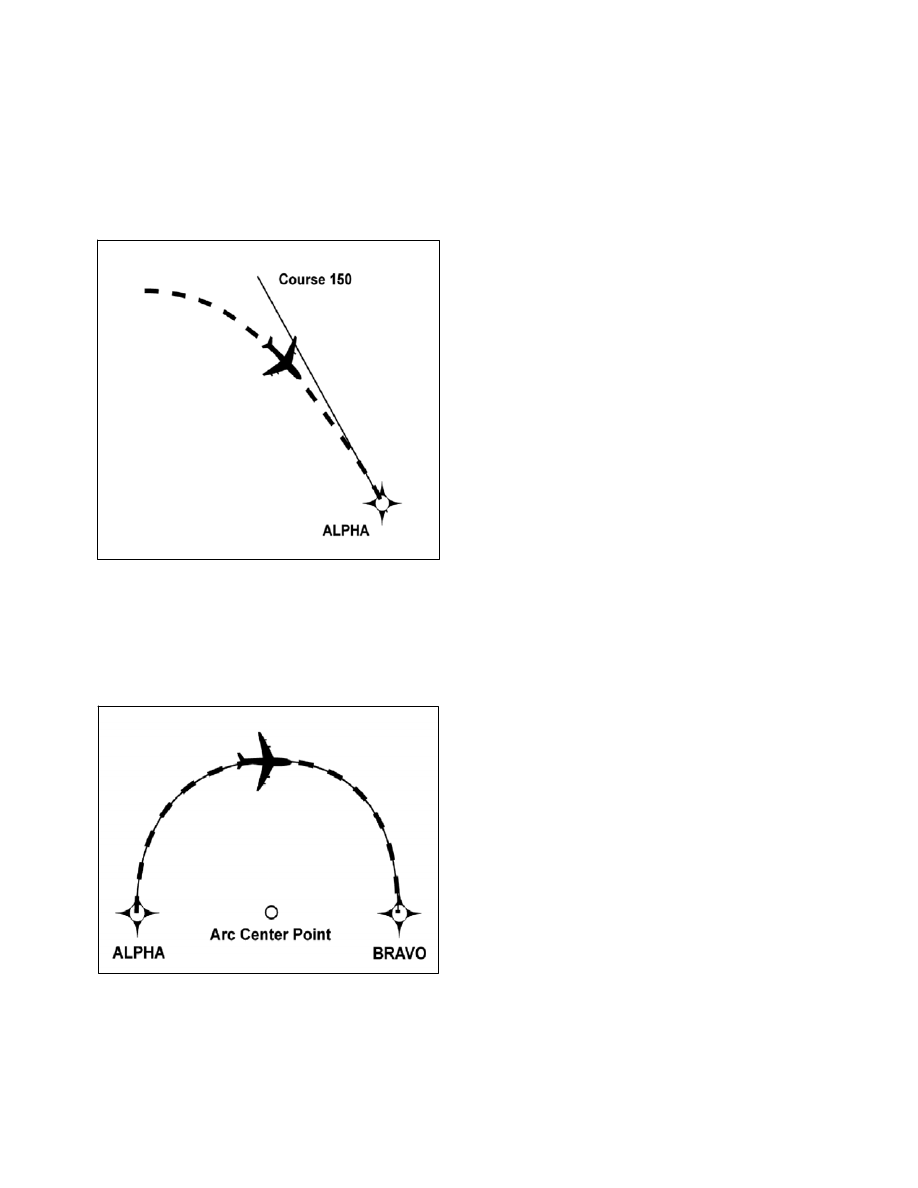
(c) Course to Fix.
A Course to Fix (CF) leg
is a path that terminates at a fix with a specified course
at that fix. Narrative: “on course 078 to PRIMY
WP.”
FIG 1
−2−4
Course to Fix Leg Type
(d) Radius to Fix.
A Radius to Fix (RF) leg
is defined as a constant radius circular path around a
defined turn center that terminates at a fix. See
FIG 1
−2−5
Radius to Fix Leg Type
(e) Heading.
A Heading leg may be defined
as, but not limited to, a Heading to Altitude (VA),
Heading to DME range (VD), and Heading to Manual
Termination, i.e., Vector (VM). Narrative: “climb
heading 350 to 1500”, “heading 265, at 9 DME west
of PXR VORTAC, right turn heading 360”, “fly
heading 090, expect radar vectors to DRYHT INT.”
3. Navigation Issues.
Pilots should be aware
of their navigation system inputs, alerts, and
annunciations in order to make better−informed
decisions. In addition, the availability and suitability
of particular sensors/systems should be considered.
(a) GPS.
Operators using TSO−C129 sys-
tems should ensure departure and arrival airports are
entered to ensure proper RAIM availability and CDI
sensitivity.
(b) DME/DME.
Operators should be aware
that DME/DME position updating is dependent on
FMS logic and DME facility proximity, availability,
geometry, and signal masking.
(c) VOR/DME.
Unique VOR characteris-
tics may result in less accurate values from
VOR/DME position updating than from GPS or
DME/DME position updating.
(d) Inertial Navigation.
Inertial reference
units and inertial navigation systems are often
coupled with other types of navigation inputs,
e.g., DME/DME or GPS, to improve overall
navigation system performance.
NOTE
−
Specific inertial position updating requirements may
apply.
4. Flight Management System (FMS).
An
FMS is an integrated suite of sensors, receivers, and
computers, coupled with a navigation database.
These systems generally provide performance and
RNAV guidance to displays and automatic flight
control systems.
Inputs can be accepted from multiple sources such as
GPS, DME, VOR, LOC and IRU. These inputs may
be applied to a navigation solution one at a time or in
combination. Some FMSs provide for the detection
and isolation of faulty navigation information.
When appropriate navigation signals are available,
FMSs will normally rely on GPS and/or DME/DME
(that is, the use of distance information from two or
more DME stations) for position updates. Other
inputs may also be incorporated based on FMS
system architecture and navigation source geometry.
NOTE
−
DME/DME inputs coupled with one or more IRU(s) are
often abbreviated as DME/DME/IRU or D/D/I.